Orthopedic surgery robot
骨科手术机器人
有限公司")
神经可视化脊柱微创手术导航系统
神经可视化脊柱微创手术导航系统采用先进的手术器械定位技术,结合前沿的医学图像技术及人工智能算法,可在术中提供安全精准导航,提高手术效率2-3倍,手术时长压缩一半,并发症风险降到最低,同时减少80%的射线使用,实现“零辐射”。

产品功能
²应用AR技术,对脊柱微创手术视野进行虚拟补充,使周围神经组织可视化,实时引导手术进行,极大降低手术难度。
产品特点
²神经可视化:独创多模态三维融合神经可视化技术使得术中神经清晰可见,手术安全性得到有效保证。
²靶点精准化:首创精准定位算法改良激光-惯性混合定位系统,将精度提高到小于1mm监测实时化;原创高仿真图像还原算法,实现术中图像三维空间高仿真精准还原。
² 配准智能化:基于庞大数据库进行大数据人工智能脊柱分割训练,通过自动轮廓特征提取,实现术前术中图像智能配准。
²操作简易化:AR手术引导以特殊视觉效果实现组织结构清晰可辨,在微创创口基础上实现大范围、深层次的观察,手术难度大大降低,技术学习曲线缩短。
²辐射最小化:实现基于术前正侧位影像完成三维重建,并可追踪术中操作进展,避免了术中反复摄片校准,可减少超过99%的辐射量,使手术操作中辐射降至最低水平 ,基本实现“零辐射”。
核心技术
(1)多模态三维融合神经可视化技术
独创多模态三维融合神经可视化技术,基于先进的外周神经磁共振弥散张量成像(DTI)技术,使得术中神经清晰可见,能够有效避免误伤神经而导致相关并发症的发 生。这一创造性的举措能够彻底打破目前脊柱相关微创手术中神经不可见,手术操作对经验依赖性高,需要患者提供反馈以判断是否误伤等主要缺陷,为患者健康护航。
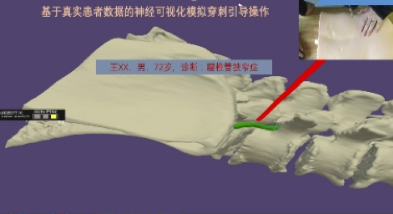
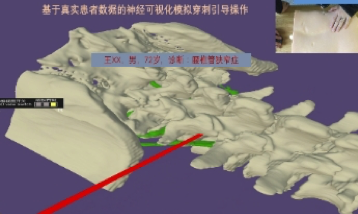
多模态三维融合神经可视化技术实现神经显像
(2)激光-混合定位系统
首创精准定位算法改良激光-惯性混合定位系统,率先将精度2-5mm提高到<1mm,成功实现其在手术导航中的应用,这一精度范围比国际公认精度要求高出1倍。定位精度的提高可显著提升治疗效果和改善患者预后,确保手术操作顺利进行,可实现快速精准定位,且不受环境影响,体积小,易操作,可在一定范围内耐受遮挡,有效契合医生操作。
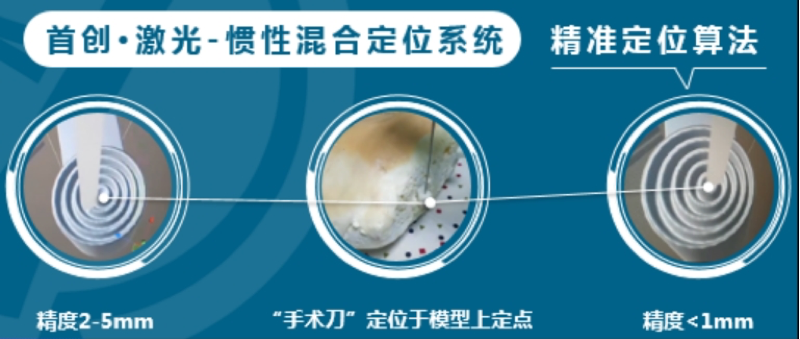
激光—惯性混和定位系统定位示意图
(3)高仿真X光图像还原算法
原创高仿真X光图像还原算法,以毫米级精度,移动透视,高度还原术中场景,采用三维直观显像技术可以看到更深的组织结构,降低医生基于二维影像图像辅助下立体感的要求,进而降低手术难度,提高手术安全性。
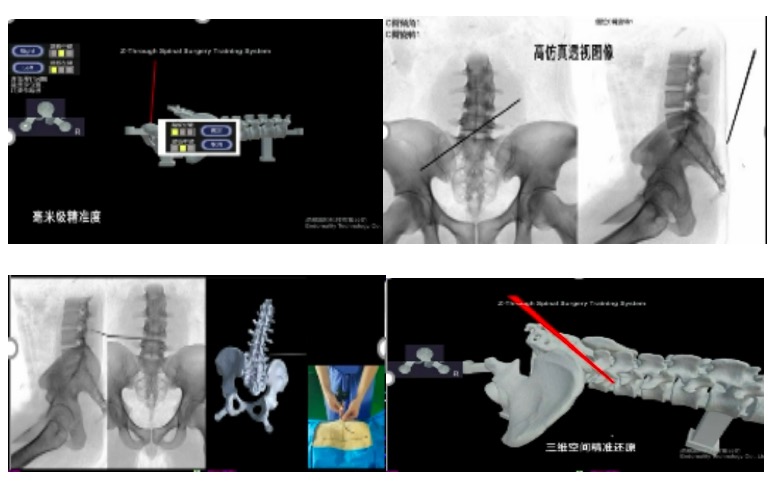
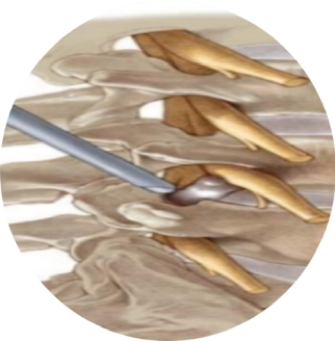
高仿真X光图像还原算法实现三维透视图
(4)人工智能术中图像配准
借助华西庞大医院的数据资源进行人工智能脊柱分割模型训练,能够有效解决现有微创手术术前CT资料与术中体位无法吻合的缺点,大大提高了植入的精准度和安全性,初步实现将配准误差控制在3-5mm,随着进一步的模型训练,精准度仍将显著提高。同时降低了术者和患者的辐射剂量和次数,减少超80%的辐射量。

人工智能脊柱图像匹配示意图
(5)AR手术引导
AR技术的投入使用,可以在在最小创伤外科手术创口基础上,提供深层体内视图,间接扩大手术视野,能够更清楚的辨识患者组织结构,带来外科手术革命性的变化,极大程度上降低了微创手术难度,甚至可进一步促使手术创口微创化。

内窥镜及AR引导下手术视野对比
产品先进性
²大幅度提高手术成功率,攻克现有脊柱微创手术中因视野受限、组织辨识度低、临床经验依赖性高等原因导致的手术失败及手术并发症频发,率先提出能与现有微创技术发展水平相匹配的神经可视化脊柱微创可视化导航系统。
²能够显著缩短手术时长,从75min缩短至40min以内,临床影响长远,可有效缓解就医压力,同时组织暴露时间越短,损伤越小,预后越好,将成为医生和患者的双重选择
²缩短手术培训学习周期,提高手术操作安全性,有效避免并发症,在保证治疗效果和手术安全性的同时,降低了对医生本身资质的要求,扩大了掌握相应技术的医生群体数量。
²技术多为自主研发,并率先结合应用前沿高新技术,产品技术水平高度领先,形成技术壁垒,使得在未来的市场竞争中处于优势地位。
²聚焦脊柱微创手术,着力解决临床细分专科的实际需求,在该领域达到国内外领先水平。

有限公司")
Copyright © 2023 华西精创医疗科技(成都)有限公司